产品搜索

辉度箱LSB-111WCRI-4CNJ
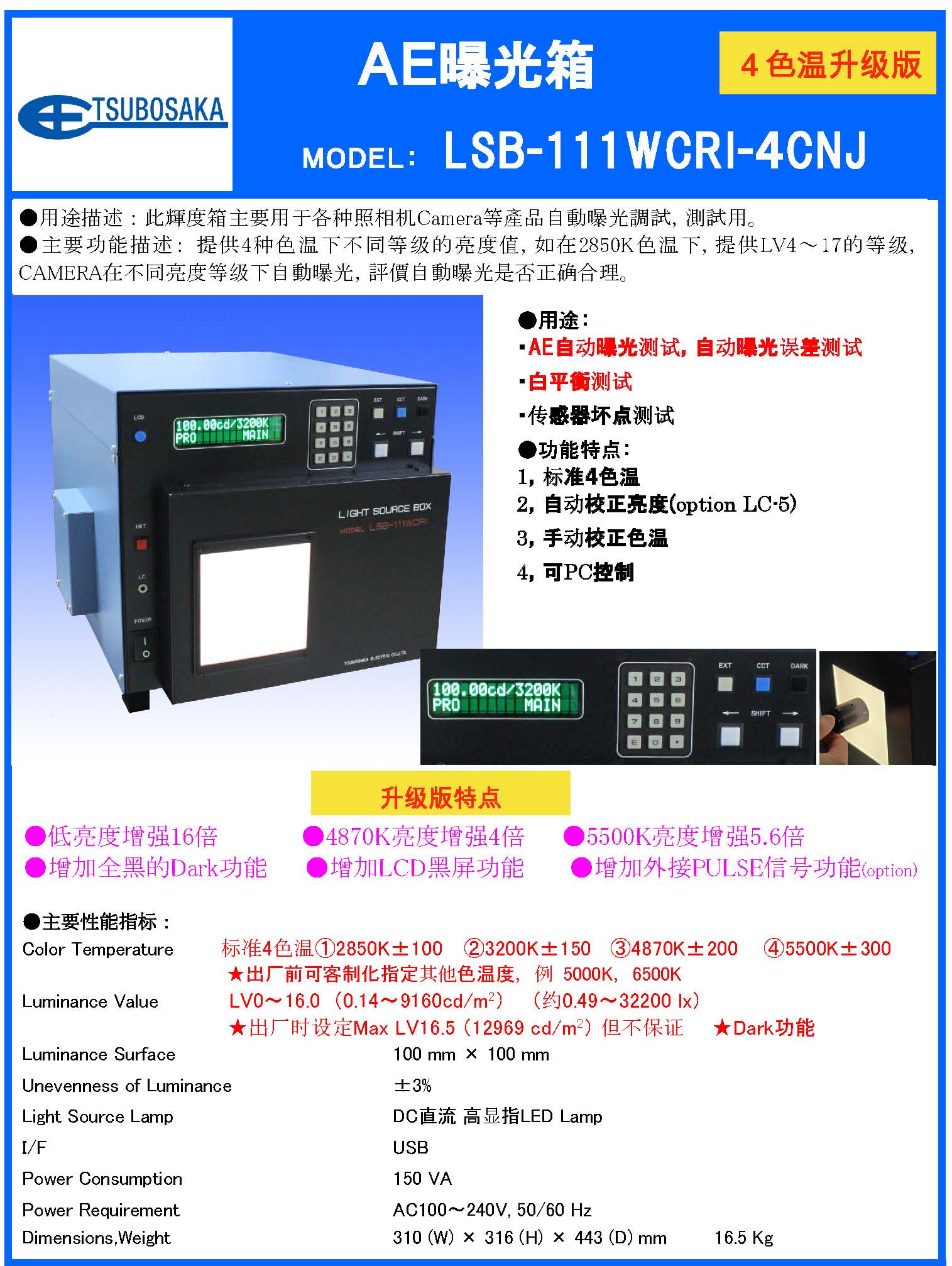
摘要:辉度箱LSB-111WCRI-4CNJ主要用于各种摄像头等产品自动曝光调试,测试用,还可以测试摄像头周边光亮,提供四种色温下不同等级的亮度值,如在2850K色温下,提供LV4-LV17等级的的亮度,评价摄像头在不同亮度下自动曝光功能,评价自动曝光是否正确合理。
辉度箱LSB-111WCRI-4CNJ主要用于各种摄像头等产品自动曝光调试,测试用,还可以测试摄像头周边光亮,提供四种色温下不同等级的亮度值,如在2850K色温下,提供LV4-LV17等级的的亮度,评价摄像头在不同亮度下自动曝光功能,评价自动曝光是否正确合理。

辉度箱LSB-111WCRI-4CNJ是辉度箱辉度箱LSB-111-4C的升级品,低亮度增加16倍,4870K增强4倍,5500K增加5.6倍,全黑增加DARK功能,增加LCD黑屏功能等。